

Spectroscopie à distance – Le module moteur UVEX
Lorsque j’ai cherché à mettre à niveau mon LISA en 2020, l’UVEX avait beaucoup d’éléments convaincants. Sa capacité à accéder à une large gamme spectrale était importante, tout comme la flexibilité d’ajuster l’angle du réseau et de permuter les réseaux pour passer d’une résolution basse à moyenne. Cependant, la caractéristique clé était l’unité motrice proposée. Il promettait à la fois de modifier l’angle du réseau et de régler la mise au point du miroir M2 à distance. J’ai donc acheté une première version UVEX et j’avoue que j’ai harcelé François et son équipe pour qu’ils m’envoient un bloc moteur dès sa sortie commerciale. Mon unité m’a été expédiée en octobre 2022.

Peter Velez
est un astronome amateur et spectroscopiste australien. À la recherche d’une distraction de son travail d’avocat d’entreprise, Peter a étudié l’astronomie à l’Université de Swinburne, obtenant une maîtrise en 2016, ce qui a ravivé sa passion d’enfance pour tout ce qui concerne l’astronomie. Un projet visant à déterminer le taux d’expansion de l’univers en observant le quasar 3C-273 à l’aide d’un spectroscope LISA l’a conduit sur la voie de la spectroscopie : le voyage continue. Peter observe depuis l’installation iTelescope de l’observatoire de Siding Springs, NSW Australie et consacre la majeure partie de son temps à l’identification des étoiles symbiotiques et transitoires.
Observatoire & Installation
Mon équipement est hébergé dans l’installation iTelescope de l’observatoire de Siding Spring, NSW Australie. iTelescope est une opération commerciale avec des installations dans le monde entier. Je loue un espace dans un observatoire avec environ 25 autres télescopes. Le hangar a un toit roulant contrôlé par la station météo iTelescope. Je n’ai pas besoin de me préoccuper de l’ouverture et de la fermeture du toit car cela est géré en externe.
Ci-contre, une photo de l’observatoire.


J’ai un un emplacement dédié avec un PC et un switch d’alimentation contrôlé par le Web dans une armoire électronique au pied de mon emplacement. J’accède au PC à l’aide de Teamviewer depuis mon domicile à Sydney. La monture est une Paramount MX et est contrôlée avec The SkyX. Mon télescope principal est un Planewave CDK 12.5 avec un porte-oculaire intégré. J’utilise également un Takhashi Sky 90 monté sur le télescope principale pour la photométrie simultanée.
J’utilise le module de guidage et de calibration Shelyak. La caméra scientifique est une Atik 460EX et la caméra de guidage est une ASI174MM. Pour pouvoir accéder au NIR et à l’IR, je dispose d’une roue à filtres électronique ZWO avec un seul filtre bloquant les longueurs d’onde inférieures à 5300 A.
Ci-contre, une image de ma plate-forme dans le hangar. Le bloc moteur UVEX se trouve en bas à gauche.
Commande à distance et automatisation
Comme je récupère mes spectres à distance, je dois être aussi indépendant que possible. Il y a un technicien expérimenté sur place au SSO pour entreprendre la maintenance – mais je ne peux raisonnablement pas lui demander d’allumer et d’éteindre mes lampes d’étalonnage et de flate ou encore de changer l’angle du réseau ainsi que de faire la mise au point la nuit. Outre la nécessité de surveiller de nombreux autres systèmes, c’est un environnement dangereux dans l’obscurité avec des télescopes beaucoup plus grands que le mien.
L’unité de moteur UVEX est un élément clé de mon système.
Le « Saint Graal » pour les spectroscopistes est l’automatisation – la possibilité de mettre nos systèmes en marche, de se coucher et de se réveiller le lendemain pour trouver nos disques durs pleins de données. Ce n’est pas une tâche facile – prendre des spectres, c’est comme faire du risotto. Peu importe la quantité de préparation que vous faites, cela nécessite une attention constante. Cependant, avec le bon équipement et les bons logiciels – et beaucoup de patience – vous pouvez demander à votre ordinateur de regarder le risotto pour vous. J’utilise Voyager Array pour gérer mon système. D’autres utilisent Prism ou des programmes personnalisés.

Le module moteur UVEX – contrôle d’étalonnage intégré
Pour produire des spectres calibrés de manière fiable, nous devons prendre un spectre d’une lampe de calibration avant, et souvent après, chaque cible. Auparavant, je gérais cela en utilisant un commutateur Web pour contrôler l’alimentation 12 V des lampes de du module d’étalonnage Shelyak, ce qui était encombrant.
Le module moteur UVEX a un contrôle d’étalonnage intégré. Le logiciel USIS Controller fourni par Shelyak permet à l’observateur de contrôler à distance l’unité d’étalonnage – un simple clic permet à l’unité d’étalonnage d’être prête pour la prise de trames d’étalonnage, de flates, darks et bias.
J’utilise rarement le programme USIS Controller. Dans un développement qui fut le bienvenu, l’équipe Shelyak a préparé et publié le protocole USIS qui permet aux utilisateurs d’écrire leur propre logiciel. J’ai réussi à préparer une série de scripts Python qui contrôlent le module moteur. Ces scripts sont appelés lorsque c’est requis par mon programme d’automatisation. Donc, avant de prendre le spectre d’une cible, mon système se connecte au module moteur, allume la lampe, prend le spectre, éteint la lampe et se déconnecte du module moteur.

Le module moteur UVEX – réglage de l’angle du réseau
La spectroscopie, comme la vie, nécessite inévitablement des compromis. Avec un réseau de 600 lignes/mm, mon système donne une plage d’environ 2000 A avec une résolution comprise entre 1000 et 1700. Un réseau de 300 lignes/mm fournirait une plage beaucoup plus large mais à une résolution considérablement réduite. Un réseau de 1800 lignes/mm fournirait une résolution plus élevée mais serait limité à des cibles plus lumineuses. La possibilité de modifier l’angle du réseau à distance me permet d’obtenir une plage plus large avec une bonne résolution.
Pour illustrer, voici un graphique de 3 spectres pris de V618 Sgr, une possible étoile symbiotique sélectionnée dans la liste des candidats du programme Suspected/Misclassified Symbiotics développé par le Dr Jaroslav Merc.
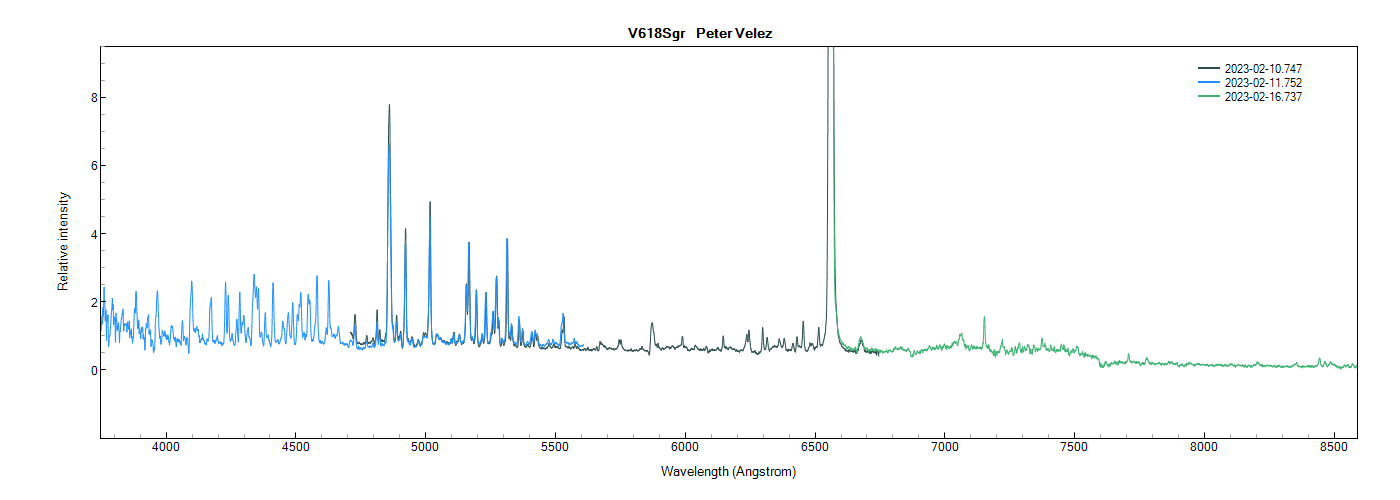
Les spectres ont été pris les 10, 11 et 16 février 2023. La gamme spectrale est de 3600 – 8500 A. La résolution va de 1037 (en UV) à 1672 (NIR). Il est souvent difficile d’apprécier la résolution d’un spectre où le tracé comprend une émission Ha brillante. Ci-dessous se trouve le spectre centré sur le regi UV/bleu.

Ces spectres ont été pris à des nuits différentes car la cible n’a dépassé 30 degrés d’altitude qu’une heure avant le lever du soleil. Une même cible peut être observée avec des gammes spectrales différentes au cours d’une même soirée. Comme avec l’unité d’étalonnage Shelyak, je contrôle l’angle du réseau avec de simples scripts Python. J’ai choisi 4 gammes de longueurs d’onde – UV, visuel, NIR et IR avec un certain chevauchement entre elles. Ceux-ci sont appelés par mon programme d’automatisation lorsque cela est nécessaire. Les scripts génèrent la position de début et de fin du réseau et ces données sont enregistrées dans le journal de mon programme d’automatisation. J’ai également déterminé les temps d’exposition optimaux pour les trames de flates et d’étalonnage pour chaque gamme. Si je veux ajuster le réseau, je le change, prends une séquence d’images flates, balaie vers ma cible, prends des images ArNe et commence l’imagerie.
Le logiciel USIS Controller et le protocole USIS permettent à l’utilisateur de régler l’angle du réseau soit en référence à l’angle, soit à la longueur d’onde. La longueur d’onde est à son tour définie par la spécification du réseau (c’est-à-dire 600 lignes, 1200 lignes, etc.) entrée par l’utilisateur. Ce que j’ai trouvé, c’est que même si le fonctionnement du moteur était reproductible, la longueur d’onde indiquée ne reflétait pas nécessairement la longueur d’onde réelle. Par exemple, s’il est dirigé pour centrer le réseau sur la longueur d’onde 4700 A, l’unité a en fait amené le réseau à 4554 A. Si je passais à une autre longueur d’onde puis revenais à 4700 A, il revenait toujours à la même position – dans ce cas 4554 R. Je comprends d’après Shelyak que c’est parce que les réseaux eux-mêmes ne sont pas rapportées avec précision. Ainsi, un réseau de 600 lignes par mm peut en fait avoir 580 ou 620 lignes par mm, d’où l’erreur. Pour moi ce n’est pas un problème. J’ai théoriquement « calibré » mes scripts Python en déterminant la position centrale requise dans mon script pour obtenir la longueur d’onde où je le veux.
Le module moteur UVEX – autres éléments
Le module moteur UVEX possède un certain nombre d’autres fonctionnalités utiles. Tous les spectroscopes sont sujets à une certaine instabilité thermique. Cela se manifeste par un changement de spectre lorsque la température ambiante change. L’UVEX ne fait pas exception, bien que la version actuelle de l’instrument fut mise à jour et soit assez stable. Le module moteur UVEX rapportera la température de l’instrument sur demande. Cette fonction est utile pour tester la stabilité de votre instrument.
Le module moteur contrôle également la mise au point du miroir M2. J’ai trouvé que la mise au point de mon UVEX est assez stable. Une fois réglée, je n’ai pas eu besoin de l’ajuster malgré les énormes changements de température de l’été australien.
Sources
Il existe quelques options pour les logiciels d’automatisation. J’utilise Voyager Array. D’autres utilisent Prism ou des programmes personnalisés tels que Python ou Ineos.
Je ne suis pas un développeur de logiciels mais je suis prêt à partager les scripts Python que j’ai développés. Je peux être contacté sur peter@oblaw.net.au