Bien choisir sa caméra d’autoguidage en 2020
Par Olivier Garde & François Cochard

En spectroscopie astronomique, la caméra de guidage est un élément important, puisque c’est elle qui permet de pointer la bonne cible (étoile, nébuleuse, etc), puis d’assurer un guidage précis pour injecter le maximum de lumière dans la fente du spectroscope. On ne doit jamais oublier que ce qui différencie une « belle » observation d’une observation médiocre, c’est uniquement la quantité de lumière injectée dans le spectroscope !
L’offre en matière de caméras de guidage est en permanente évolution, et les caméras CCD que nous recommandions il y a encore quelques mois (Atik Titan et 314L+) ne sont plus disponibles aujourd’hui. Les caméras qui sont à notre portée sont maintenant toutes en technologie CMOS ; ce changement de technologie nous offre l’opportunité de regarder en détail les critères de sélection d’une telle caméra.
Au premier abord, la technologie CMOS remplace intégralement le CCD, sans effet apparent pour l’utilisateur. En fait, il y a tout de même des différences notables :
- Le prix des capteurs CMOS est nettement moins chers que les CCD.
- Les pixels des caméras CMOS sont généralement plus petits.
- La dynamique de lecture est plus faible (pour le moment) en CMOS (12 bits en CMOS au lieu de 16 bits en CCD dans la plupart des cas).
- Le signal thermique, qui avait quasiment disparu avec les derniers CCD fait sa réapparition sur le CMOS, ce qui impose un refroidissement efficace pour garder le même niveau de performance.
- On voit également sur les capteurs CMOS un phénomène appelé « Amp glow », lié à la sensibilité thermique. Cela se traduit par des zones claires dans l’image. Cet effet est plus ou moins bien corrigé selon les fabricants.
- Les défauts inhérents aux capteurs sont différents : on n’a plus de pixels chauds en CCD, mais on voit apparaître du « bruit télégraphique », qui peut donner une valeur aberrante à un pixel donné dans une image donnée. Les pixels chauds des CCD restaient toujours à la même place, alors que les pixels déviants en CMOS se déplacent d’une image à l’autre (il ne s’agit plus d’un défaut interne au pixel, mais d’un défaut au moment de la lecture du pixel).
- Le bruit de lecture du CMOS est nettement plus bas que dans le CCD.
- En revanche, il n’est plus possible de faire du « binning analogique ». En CCD, on pouvait rassembler plusieurs pixels pour améliorer la sensibilité (au prix d’une perte de résolution), ce n’est plus possible en CMOS (où chaque pixel dispose de son propre système de lecture). On peut bien entendu toujours faire un binning numérique (après lecture analogique du pixel), mais alors on ne profite plus du fait de ne réaliser qu’une seule lecture pour plusieurs pixels.
Fort de ces éléments techniques, il nous semble opportun de regarder l’offre actuelle (janvier 2020) des caméras de guidage, pour son application à la spectroscopie astronomique.
Selon votre équipement et votre projet (pédagogique, scientifique…), et le type de cible que vous voulez observer le choix peut être différent. Cet article veut énumérer les divers critères à prendre en compte pour déterminer la meilleure caméra pour garantir un autoguidage et un pointage de qualité en spectroscopie. Il est basé sur les caméras existantes au moment de la publication de cet article.
Rendement quantique
Un des premiers critères à prendre en compte est le rendement quantique du capteur. Cependant à ce jour, la majeur partie des dernières caméras mises sur le marché ont un rendement quantique maxi de l’ordre de 74 à 77 % dont le pic en intensité est situé vers les 500 à 550 nm. Ce ne sera donc pas discriminant en pratique.
La taille du pixel
Les caméras ont des pixels de tailles très différentes variant d’un facteur 4 environ (2,1µm pour les plus petit pixels, jusqu’à 9µm pour les plus gros). La taille du pixel a plusieurs effets :
- Plus un pixel est gros, plus il est sensible et donc peut détecter des cibles plus faibles pour un même temps de pose. Il est donc important de prendre ce critère en compte en fonction de la magnitude des cibles que l’on compte pointer.
- Mais d’un autre coté, on doit veiller à toujours garder un échantillonnage correct, c’est à dire que le pixel doit être plus petit que le plus petit détail donné par l’optique de guidage. En spectroscopie, c’est essentiellement la taille de l’image d’une étoile sur le capteur de guidage qu’il faut considérer. Cette taille dépend principalement de la qualité du ciel (seeing), et de la focale de l’instrument (éventuellement corrigée de la réduction de focale de l’étage de guidage).
Avec un instrument de petite focale (disons moins d’un mètre de focale), il vaut mieux vérifier ce point avec ce petit calcul simple :
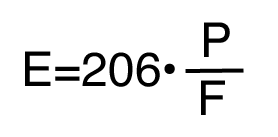
Ou :
E = échantillonnage du setup (optique+ caméra) en seconde d’arc/pixel
P = taille du pixel en µm
F = focale de l’optique en mm
D’après les critères de Nyquist-Shannon, il faut échantillonner le signal (ici l’image de l’étoile) avec un facteur x2 voire x3. Dans tout les cas, il vaut mieux sur-échantillonner que sous-échantillonner.
En pratique, il faut toujours préférer des gros pixels, sauf à utiliser un instrument de courte focale (< 1m) ou être dans un un site avec un ciel exceptionnel (très bon seeing). Dans ces cas, un rapide calcul d’échantillonnage est le bienvenu.
Le champ du capteur
Le champ du capteur d’autoguidage doit être suffisamment grand pour bien identifier la cible, que ce soit visuellement (en comparant par exemple les étoiles du champ avec une carte de champ) ou automatiquement (par une reconnaissance du champ via astrometry.net par exemple). Si le champ est trop petit, il ne comportera pas beaucoup d’étoiles et il sera difficile d’identifier à coup sur la cible.
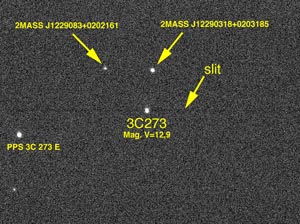
Exemple de champ avec un capteur 1/3′ (4,83 x 3,6mm)
(Image : Olivier Garde)
L’image ci-dessus, montre le champ d’un capteur d’1/3 pouce utilisé sur un C14 + réducteur de focale ramenant la focale native du télescope à 2.5 m environ. La cible pointée est le quasar 3C 273 d’une magnitude V=12,9, le temps de pose unitaire pour obtenir cette image est de 3s en binning 1×1 (pixels de 7,4µm). On constate que l’on a pas beaucoup d’étoiles visibles dans le champ de ce capteur. La reconnaissance de champ peut être délicate surtout si le pointage du télescope n’est pas précis (dans ce cas la cible ne sera même pas visible sur le capteur).
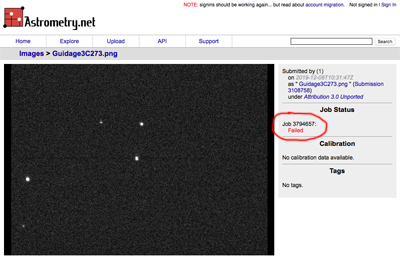
Résultat de l’identification du champ via astrometry.net
Si l’on télécharge cette image sur le site astrometry.net, celui ci n’est pas capable de reconnaître le champ. Dans le cas de ce setup (C14 @ f/d7) on aura intérêt à utiliser un capteur plus large, par exemple un capteur Sony IMX174 dont la surface est plus de 2x plus grande qu’un capteur 1/3′ de pouce.
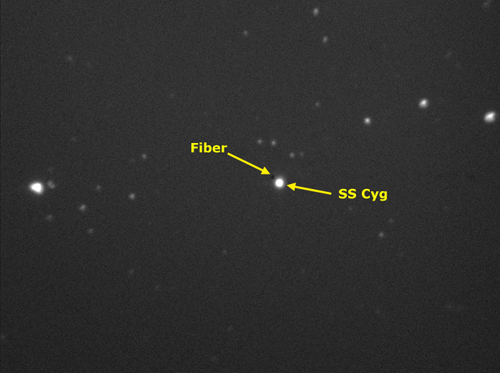
Champ d’autoguidage sur un RC400 @ f/d 6,3 et un capteur Sony ICX-285AL
(image : Olivier Garde)
L’image ci-dessus, montre l’étoile SS Cyg (mag. V=7,70) sur un capteur de 9 x 6,7mm. Il y a beaucoup plus d’étoiles visibles dans le champ (zone de la constellation du Cygne qui est assez dense en étoile). Il est dans ce cas facile d’identifier la cible.
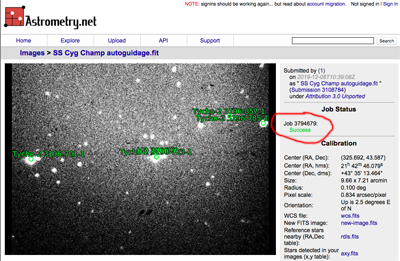
En téléchargeant l’image dans astrometry.net, là l’identification du champ est réussie.
En fonction de la focale de son instrument, il faut donc choisir un capteur assez grand afin de pouvoir identifier à coup sûr la cible.
Dans certains cas, quand la cible observée est particulièrement faible, on peut être contraint de guider sur une autre étoile que la cible. Dans ce cas, l’étoile de guidage sera en dehors de la fente. Un grand capteur donne alors plus de chances d’avoir une étoile brillante dans le champ.
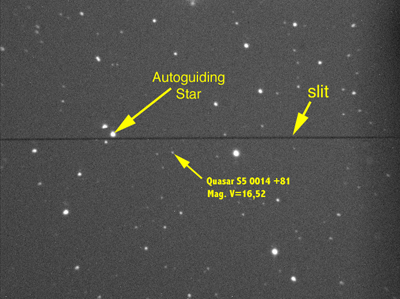
Champ d’autoguidage du Quasar S5 0014 +81 (capteur de 9 x 6,7mm)
(Image : Olivier Garde)
Ici la cible est un quasar de magnitude V=16,5, on ne peut pas guider sur la cible directement car trop faible voir invisible pour des temps de poses de quelques secondes, il faut donc pouvoir disposer d’une étoile dans le champ du capteur plus brillante sur laquelle on effectuera l’autoguidage.
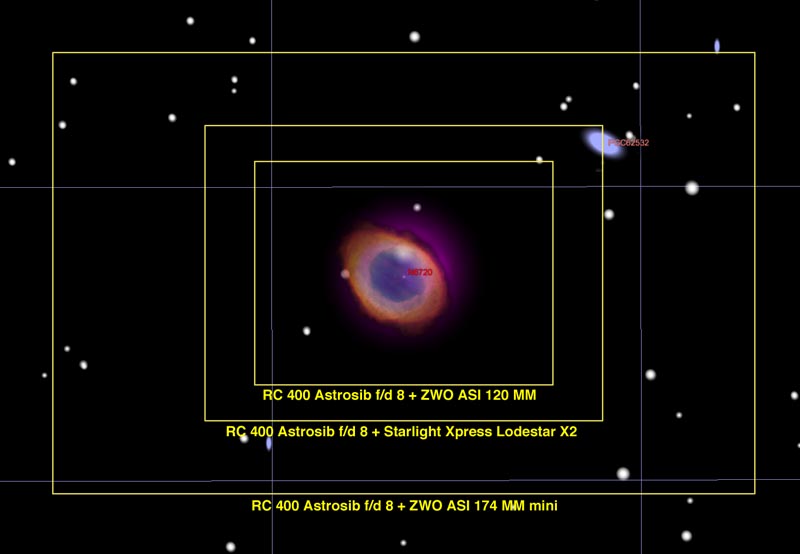
L’image ci-dessus montre 3 champs de différents capteurs généralement utilisé en autoguidage. Le plus petit est le champ que l’on obtient avec des capteurs comme l’ATIK Titan, l’ASI 120MM, la QHY 5LII, la SBIG STI. Le plus grand correspond aux caméras équipées de capteurs SONY IMX 174.
Attention : dans certains spectroscopes, le miroir de guidage – qui renvoie l’image du télescope vers le capteur de guidage – limite le champ effectif de guidage. C’est en particulier le cas pour le module de guidage Alpy ; dans ce cas, il n’est pas utile d’avoir un très grand capteur.
Port ST4
Le port ST4 permet de piloter la monture au travers de la caméra, en simulant des appuis sur les touches de déplacement de la monture. La plupart des logiciels d’autoguidage dispose de cette fonctionnalité. La solution alternative est de piloter la monture par un protocole informatique dédié, propre à chaque équipement. Si on a le choix entre le guidage direct de la monture ou le guidage via le port ST4, il faut plutôt privilégier cette dernière solution pour 2 raisons :
- Le guidage est plus réactif et précis via le port ST4 (surtout visible sur les grandes focales et les anciens PC avec de vieux OS comme XP ou W7)
- Certaines montures ne permettent pas d’auto-guider via le driver de la monture en utilisant une interface ASCOM, très répandue aujourd’hui, et bien pratique. Cela concerne certains télescopes d’observatoires professionnels ou de missions.
Disposer d’une interface ST4 n’est donc pas strictement nécessaire, mais apporte une garantie de guidage précis sur certains setup.
Refroidissement
Refroidir une caméra permet de faire de longs temps de pose, toute en contenant le signal thermique (et son bruit associé) à des niveaux acceptables. Dans la majeure partie des cas, les temps de pose de guidage sont courts (quelques secondes au maximum), et le refroidissement est donc inutile. Mais si vous comptez observer des cibles faibles, alors le refroidissement devient nécessaire – surtout avec un capteur CMOS.
Un long temps de pose permet également d’identifier plus facilement la cible et de faire une reconnaissance automatique de champ.
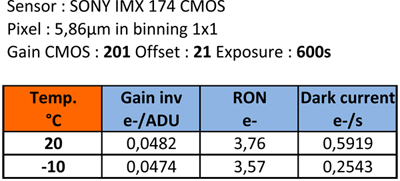
Le tableau ci-dessus montre la diminution du signal thermique en fonction du refroidissement du capteur sur une pose longue de 600s. Dans certain cas (pour des cibles très faibles), il peut être nécessaire en spectroscopie de poser 1 à 2 minutes sur le capteur d’autoguidage pour bien identifier la cible et son positionnement sur la fente du spectrographe. Dans ce cas l’utilisation d’une caméra refroidie est un atout précieux.
Quelle caméra choisir ?
Il y a beaucoup de caméras d’autoguidage disponibles sur le marché et il n’est pas toujours évident de trouver le modèle correspondant à son instrumentation et au budget que l’on s’est fixé. Voici un tableau montrant quelques caméras d’autoguidage, certaines ne sont plus commercialisé (ATIK 314L+ ou ATIK Titan) mais beaucoup d’astronomes amateurs en possèdent une. Elles peuvent aussi encore être achetées d’occasion.
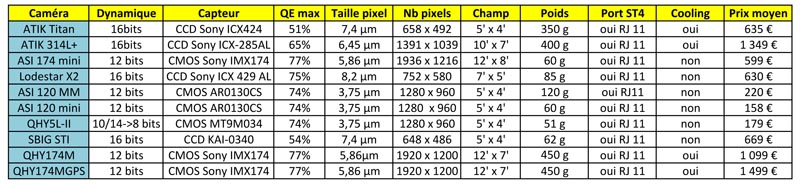
• Tout les capteurs sont monochromes • Le champ indiqué est pour un télescope de 400mm @ f/d 8 -> 3200 mm de focale
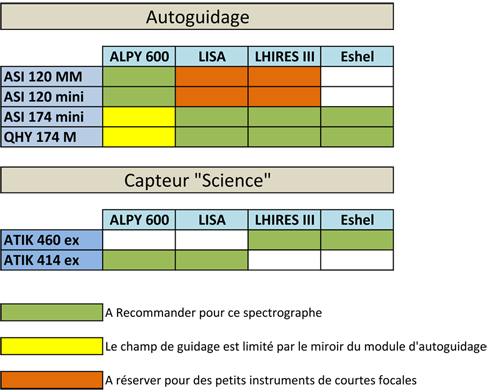
Nos recommandations de caméras
Voici un tableau montrant nos recommandations de caméras d’autoguidage pour un usage en spectroscopie sur des modèles actuellement commercialisés (janvier 2020)